

Director of Business Development, Brooks Automation
Artificial intelligence can already guide how laboratory procedures should run. The problem is most labs cannot carry through those decisions during execution.
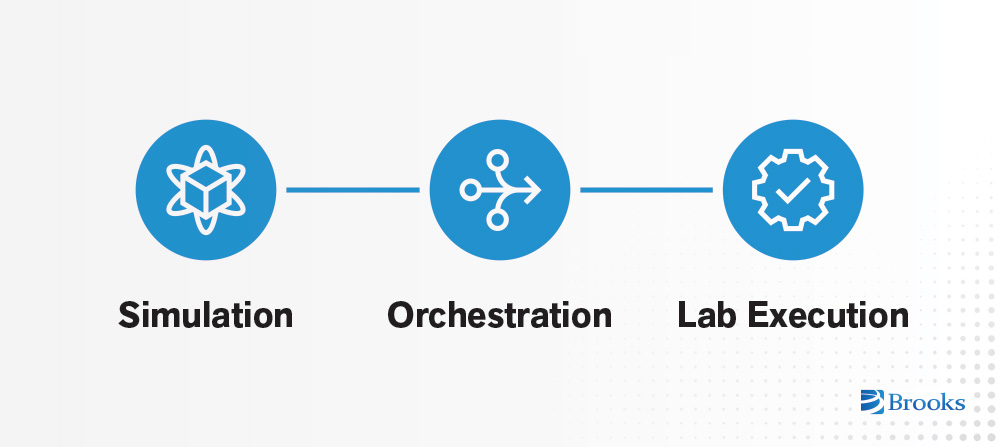
Physical AI aims to close that gap. It connects simulation, data, and real lab workflows so decisions can shape what happens in the moment, not just before a run starts. Right now, that connection is limited. The issue is not the models. It is the systems that are supposed to act on them.
When labs can turn decisions into real actions without delay, workflows change. Experiments move faster, systems adapt in real time, and scaling becomes more practical.
What Physical AI Means In Lab Automation
Physical AI in labs is about connecting what the system knows with what the lab actually does. It moves automation from fixed instructions to workflows that can respond to data as it comes in.
Most labs are already automated to some degree. Instruments run predefined processes, and software manages sequencing. AI models build on top of this foundation. They improve how experiments are planned and how data is analyzed.
You see this today in:
- Experiment design and optimization
- Data analysis and pattern recognition
These tools help narrow the scope of an experiment before it begins. Instead of testing every possibility, labs can focus on the most relevant conditions. This creates a more efficient starting point.
But once execution begins, most workflows remain fixed.
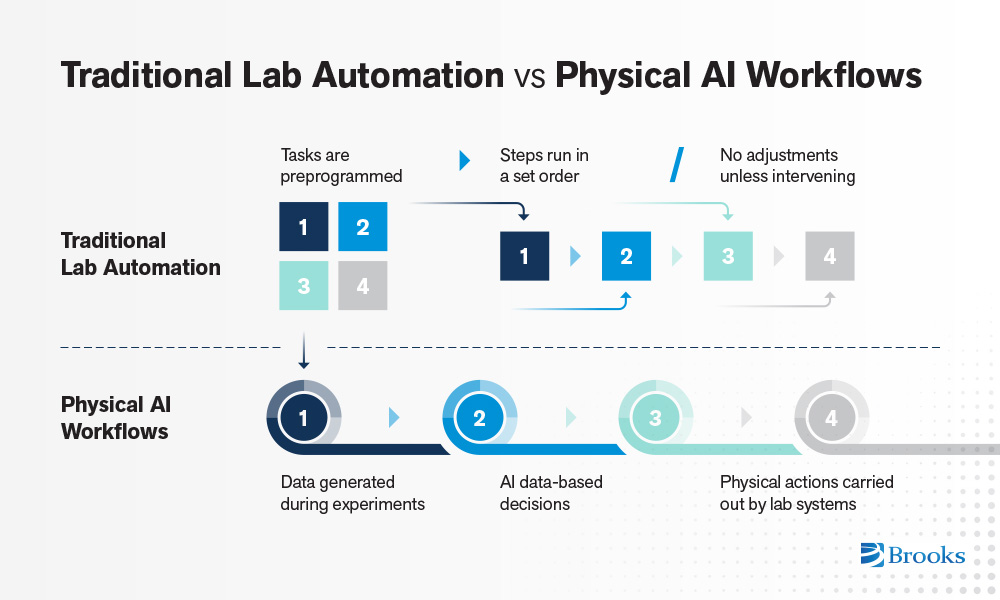
Traditional lab automation follows a defined path:
- Tasks are preprogrammed
- Steps run in a set order
- Systems do not adjust unless someone intervenes
This creates a gap between planning and execution. Decisions made during analysis do not carry through to what happens in the lab.
Physical AI focuses on closing that gap.
It connects:
- Data generated during experiments
- Decisions based on that data by AI systems
- Physical actions carried out by lab systems in the physical world
Instead of running a fixed sequence, workflows can change based on new inputs during execution.
This shift is becoming more relevant as labs generate more data and push for faster iteration. Planning alone is no longer enough. Systems must be able to respond during execution, not just before it begins.
How Physical AI Is Starting To Change Lab Work
Workflows begin to shift once systems can respond during execution instead of following a fixed sequence.
Tasks no longer need to run in a strict order. The system can adjust timing and sequence based on current conditions, allowing decisions to influence execution as the workflow is running.
A common example is scheduling. Instead of waiting for a single instrument, the system can reassign tasks based on availability and workflow state. When resources become available, execution continues without manual coordination. This is an early step toward process-level decision making, where systems begin to coordinate work based on real-time conditions.
Adjustments can also happen within experiments. If new data suggests a change is needed, parameters can be updated without restarting the workflow. This supports a more iterative process, where results feed directly into the next step.
Handling variation is another area where this matters. Samples and labware are not always identical. Small differences in size or placement can affect how tasks are performed. A more adaptive system can account for these differences without manual correction.
These changes are already visible in common lab use cases, such as dynamic scheduling, in-process adjustments, and handling variation in samples or labware.
- Fewer unnecessary experiments are run because planning and execution are more closely connected
- Iteration cycles become shorter since workflows can adjust in place
- Equipment is used more efficiently because systems respond to availability in real time
Challenges In Applying Physical AI In Labs
Physical AI depends on a system’s ability to connect decisions with real-world execution. In most labs, that connection is still difficult to achieve. In many cases, the limitation is not the lab itself.
“The labs are ready. It’s just a matter of the equipment being ready at the end of the day.” — Mike Ouren, Director of Business Development, Brooks Automation
System And Integration Limitations
Lab environments often include equipment from multiple vendors, each with its own software and communication method. These systems do not always work well together. APIs vary in structure and capability, which makes integration complex.
This affects how systems communicate. Many instruments operate as closed systems. Instead of allowing detailed control, they rely on simple signals such as start and stop. That limits how much a workflow can adjust once it begins.
Physical And Operational Constraints
Lab automation is not just about data. It involves moving samples, interacting with instruments, and working within fixed layouts. These factors introduce limits that software alone cannot solve.
- Samples must move between systems without delay
- Lab space can restrict how automation is deployed
- Positioning and alignment must be precise for tasks to succeed
Variability adds another layer of complexity. Samples, containers, and labware are not always consistent. Small differences in size or placement can affect how a task is performed. Systems must be able to handle this variation without constant manual correction.
As labs push for higher throughput, reliability becomes more important. Many devices were not designed to run continuously at high utilization. As usage increases, weaknesses become more visible.

Mike Ouren
Director of Business Development, Brooks Automation
This creates new challenges. Maintenance cycles can interrupt workflows. Systems may require more frequent intervention. Downtime becomes a larger issue when processes are expected to run continuously.
Technology And Execution Gaps
There are also broader limitations tied to Physical AI itself. Sensors do not always capture the environment perfectly. Perception systems can struggle with changes in lighting or positioning. Robots can perform precise movements, but real-world conditions introduce variation that is harder to control.
Another gap may appear between simulation and real deployment. A workflow can perform well in a controlled environment but behave differently in a live lab. Small differences in timing, positioning, or system response can affect results.
These challenges show that applying Physical AI in labs is not just a software problem. It requires systems that can handle variation, communicate effectively, and operate reliably under real-world conditions.
How Simulation And Software Make Physical AI More Usable
Physical AI depends on more than real-time execution. Systems must behave reliably before they are deployed in a live lab.
Simulation And Validation Before Deployment
Simulation allows teams to model lab workflows before running them on physical systems. This often involves creating a digital representation of the lab environment, including instruments, sample flow, and task sequences.
These models make it possible to:
- Test how workflows behave under different conditions
- Identify failure points early
- Validate task sequencing and system interactions
This reduces the need for trial-and-error on live equipment. Instead of discovering issues during execution, teams can resolve them in a controlled environment.
Simulation also helps account for complexity. Lab workflows often involve multiple systems with dependencies between tasks. Testing these interactions in advance improves confidence that the workflow will run as expected.
While simulation doesn’t always translate 1:1 with the real world application, it can significantly reduce the costs of planning, iterating, and executing by optimizing in the digital environment where errors are far less costly to fix.
Reducing Risk In Real Lab Environments
Running unstable workflows on physical systems can lead to downtime, delays, and wasted resources. Simulation helps avoid these issues by allowing teams to refine workflows before deployment.
It also supports safer iteration. Changes can be tested without interrupting ongoing lab operations. This is especially important in environments where equipment availability is limited and uptime is critical.
By validating workflows ahead of time, labs can reduce the risk of failure during execution and improve overall system stability.
Software Orchestration And System Control
Simulation alone is not enough. Systems must also be able to coordinate tasks during execution. This is where software orchestration becomes important.
An orchestration layer manages how different systems work together. It coordinates:
- Instruments
- Robotics
- Workflow steps and dependencies
This allows tasks to run in the correct order while adapting to changing conditions. For example, if one system is delayed, the orchestration layer can adjust the workflow without stopping the entire process.
As workflows become more dynamic, this coordination becomes more complex. Systems need to track their current state, manage dependencies, and respond to changes in real time.
Consistent system behavior depends on having precise control over each device. Without that level of control, the system cannot respond to changing conditions during execution.
Preparing Systems For Scaled Deployment
Before scaling, systems must be tested under realistic conditions. This includes verifying performance under load and ensuring consistent behavior across different scenarios.
Simulation and orchestration together make this possible. They allow teams to validate workflows, refine system behavior, and prepare for higher throughput without introducing instability.
This step is critical. Without it, even well-designed workflows can fail when moved from controlled testing to real lab environments.
How Flexible Robotics Help Turn AI Decisions Into Lab Actions
Physical AI depends on systems that can carry out decisions in real lab environments. Robotics plays a key role in this process. It connects digital decisions with physical tasks and ensures that workflows can adapt as conditions change.
Robotics As The Execution Layer
Robots act as the physical layer of lab automation. They perform tasks that require precision and repeatability, and they must operate reliably under changing conditions.
In a Physical AI workflow, robots do more than repeat predefined actions. They must respond to updated instructions during execution. This requires the ability to adjust movements, timing, and interactions based on real-time inputs.
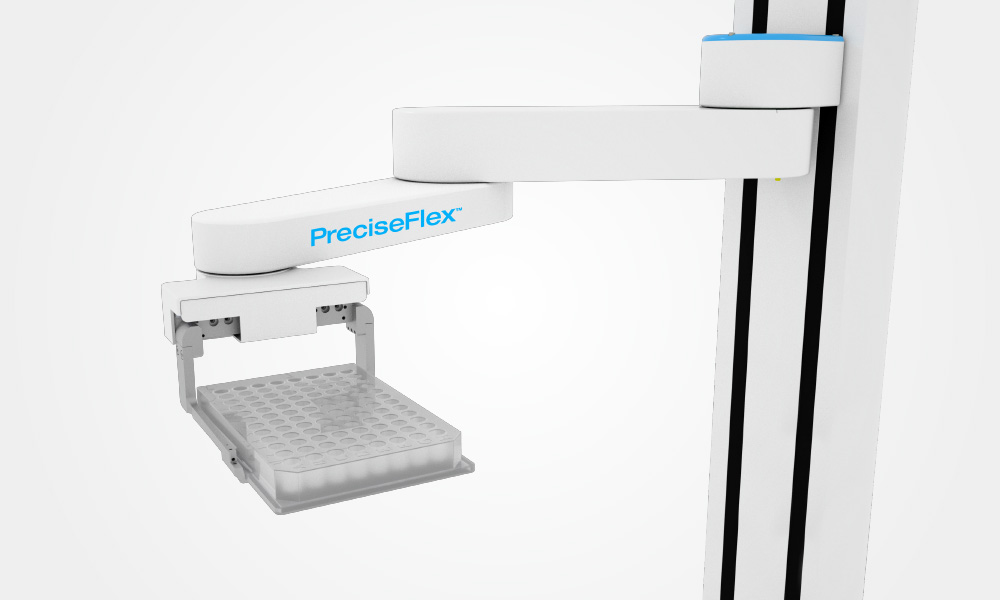
This level of control is essential for real-time adaptation. As Mike explains, “you need granular control of all the individual devices.”
Without advanced control over the robotic systems, their behavior won’t be sufficiently flexible when conditions change. The Brooks’ PreciseFlex™ robots are designed for fully customizable programming and flexibility. The robotic execution of AI decisions must allow precise motion and coordinated behavior across lab workflows.
Flexibility In Real Lab Conditions
Lab environments are not perfectly uniform. Samples, containers, and labware can vary in size, position, and condition. A rigid system struggles to handle these differences.
Flexible robotics helps address this by:
- Adjusting grip force or positioning based on the object being handled
- Adapting to different plate formats or sample types
- Supporting changes in task sequence without full reprogramming
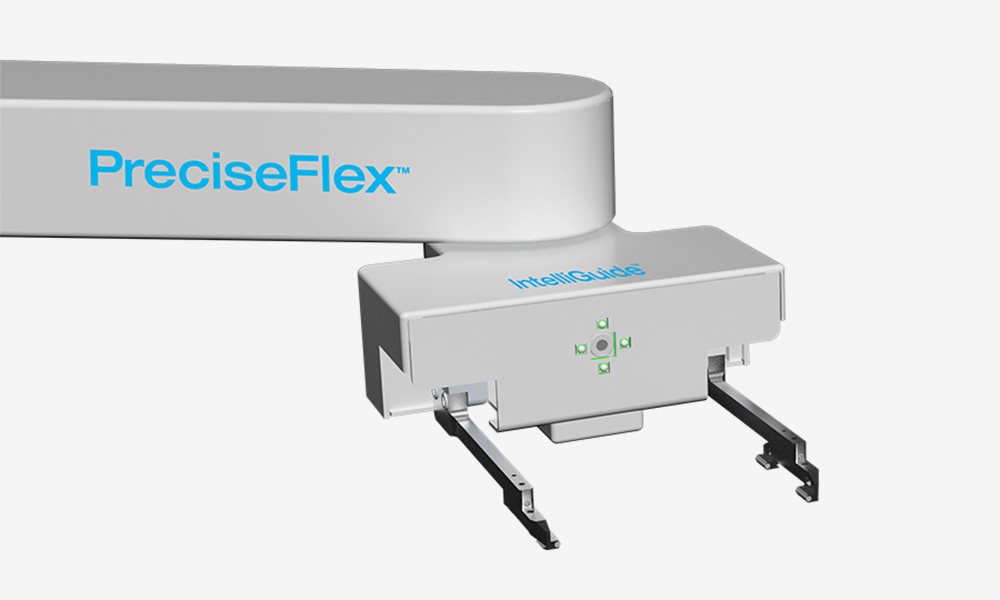
Vision-guided systems such as IntelliGuide™ Vision support this flexibility by helping robots locate and interact with labware even when positioning varies. This reduces the need for precise manual setup and allows workflows to continue with less intervention.
Integration Across Systems
Robots must operate as part of a larger system. They need to communicate with instruments, software platforms, and orchestration layers.
This requires coordination across control systems and interfaces that allow:
- Data and instructions to move between systems
- Tasks to be coordinated based on workflow state
- Adjustments to be made without stopping the entire process
Platforms such as GDS provide an API-driven layer that connects robotics, instruments, and higher-level workflow software. This allows systems to be controlled through external scheduling or workflow software, while supporting custom applications and deeper programming when needed.
Movement And Lab Logistics
In many labs, workflows are no longer confined to a single station or department. Tasks may span multiple rooms, floors, or systems. This makes movement a critical part of execution.
Mobile systems help address this by:
- Transporting materials between instruments and lab zones
- Accessing shared equipment across workflows
- Reducing the need for manual handoffs
Robotics can be integrated with mobile systems through coordinated control layers, allowing samples to move between systems without relying on fixed automation layouts. Brooks supports this type of integration through its control and API infrastructure.
Scaling Lab Workflows
Scaling depends on how systems are designed from the start.
In many cases, automation is built for a specific task and struggles to expand beyond it. Physical AI requires systems that can grow without being redesigned.
For example:
- A workflow can start at a single workstation and expand across multiple systems
- Robots and mobile systems can be added without changing the core logic
- Tasks can be re-routed dynamically as demand increases
Using a consistent control layer allows these systems to scale while maintaining the same integration approach. This improves deployment speed and reduces the effort required to expand automation over time.
Designing for this level of flexibility early makes it easier to adapt systems as workflows evolve and demand increases.
Making Physical AI Work In Real Lab Environments
Physical AI becomes useful when lab systems can act on decisions as work is happening, not just before it starts. That shift changes how labs approach speed, utilization, and scalability. It also raises the bar for how well systems need to connect, coordinate, and perform under real conditions.
Labs that move in this direction focus less on adding new tools and more on making their existing systems work together in a more flexible way.
If you are evaluating what Physical AI could look like in your lab, start with how your systems communicate and execute today.

