

Director of Product, Brooks Automation
Tote and tray handling rarely gets attention until production starts slowing down. Operators begin waiting on material, transfer points back up, and machines sit idle while demand continues to grow.
Small delays between processes can quickly reduce throughput across the entire operation.
Eliminating these issues requires better control over how material moves between processes. It also requires better use of the available workspace.
How Tote And Tray Handling Creates Bottlenecks
Most tote and tray handling bottlenecks happen at transfer points between processes, not necessarily while material is actively moving. Machines, workstations, storage systems, inspection stations, and assembly areas all depend on consistent handoffs. Without them, flow begins to slow down. And the moment it slows down, you are positioned to also incur a time cost of ramping up.
Variability Creates System-Wide Slowdowns
In many facilities, upstream and downstream processes operate at different speeds. If totes arrive too early, queues begin to build. If they arrive too late, machines sit idle waiting for material. Even small timing gaps can reduce throughput over the course of a shift.
Irregular spacing, inconsistent tray orientation, and missed transfer timing can interrupt automated processes. Operators may also need to manually correct positioning before the next step can begin.
Layout Constraints Reduce Flow Efficiency
Long horizontal travel paths increase cycle time, while congested work areas restrict access to totes and trays moving between stations.
Presentation consistency also affects downstream efficiency. Misaligned trays can slow loading and unloading, forcing operators to spend additional time correcting positioning before the next process can begin.
Congested work on linear travel paths backs up the entire line, becoming an operational bottleneck.
The Hidden Costs Of Manual Tote And Tray Handling
Hidden operational costs often outweigh the benefit of manual tote and tray handling. Labor costs may appear less expensive upfront, but variability, turnover, training demands, and production disruption can significantly reduce throughput and bottom line.
Labor Factors Create Long-Term Operational Risk
Operator pace naturally changes throughout a shift due to fatigue, repetitive motion, and workload demands. Inconsistent handling between stations creates unpredictable throughput and a harder-to-balance flow. Ultimately, operations become increasingly dependent on labor availability rather than stable, repeatable system performance.
Labor shortages and turnover create disruptions, including:
- Continuous onboarding, training, and retraining
- Higher turnover caused by repetitive handling tasks
- More handling errors caused by inconsistent experience levels
Manual handling also creates long-term safety and ergonomic concerns. Repetitive lifting, reaching, and tote movement can slow handling rates over time while increasing the risk of strain injuries. Facilities may also face OSHA-related risks tied to unsafe handling practices and congested work areas.
Why Conventional Automation Fails In High-Mix Environments
Many tote and tray handling systems are designed for predictable, fixed workflows. High-mix environments create different demands. Product flows change more often, and layouts evolve over time. Material may also need to move between a wider range of stations, storage locations, and processes.
Several conventional automation approaches can create limitations in these environments:
- Conveyors optimize continuous movement but reduce flexibility. Fixed paths can make routing changes and layout adjustments difficult without major system modifications. Also, any congestion becomes an immediate production bottleneck due to a rigid design. Conveyor systems also limit access to equipment and restrict worker movement within the facility.
- Gantry systems introduce footprint and rigidity challenges. Large physical structures require more floor space and can restrict access around the work area. As systems expand, they can also increase facility costs.
- Standard robots may struggle in dense handling environments. Spherical work envelopes can limit vertical reach. They can also make it harder to efficiently access deep racks, stacked trays, or multi-level storage areas. Traditional robots may also pose safety risks, and addressing them can affect the footprint and production organization.
Layout Constraints Reduce Throughput
Horizontal expansion increases travel distance and cycle time. Systems begin competing for floor space, while unused vertical space reduces overall operational efficiency.
Integration complexity can create additional limitations. External controllers, guarding, and exposed cabling increase system footprint. They can also make retrofitting into existing operations more difficult and costly.
Reliability And Consistency Define System Performance
High handling speeds alone do not create reliable throughput. Tote and tray handling systems also need consistent cycle times, accurate positioning, and stable operation over long production runs.
Reliable Performance Reduces Operational Disruption
Reliable handling systems reduce maintenance events and limit the need for constant operator intervention. Consistent tray presentation also improves downstream efficiency. It supports more accurate loading, unloading, and automated processing.
Vision-guided handling systems can further improve consistency by reducing positioning variability between cycles. IntelliGuide™ Vision uses embedded, factory-calibrated cameras to help robots locate trays, fixtures, conveyors, and workpieces. This reduces engineering effort and supports faster deployment.
Maintenance requirements play a major role in long-term performance. Systems built around high-wear components can introduce more downtime risk and require more frequent adjustments over time.
PreciseFlex™ robots are designed for long operational life, with an MTBF of 80,000 hours, the PreciseFlex c10 robot has a design life up to 100,000 hours. Many conventional robotic systems rely on higher wear components, like harmonic drives, that may require major maintenance significantly earlier in high-cycle handling environments.
How High-Density Robotics Improves Tote And Tray Handling
High-density robotic systems improve tote and tray handling by increasing workspace utilization without requiring large system footprints. This is especially important in high-mix environments where floor space is limited. Material also needs to move efficiently between multiple processes.
Vertical Workspace Improves Layout Efficiency
Traditional automation systems often expand horizontally as throughput demands increase. High-density robotic systems make better use of vertical space. This allows totes, trays, shelves, and equipment to be stacked within a smaller footprint.
Traditional spherical robot envelopes can limit vertical reach – or require a much larger footprint in order to reach lower and higher rack locations. Vertical column workspaces improve access across multiple heights while maintaining compact layouts. This improves workspace density and reduces the need for large gantries or extended rail systems.
PreciseFlex™ robots support vertical reach up to 1.4 meters in certain configurations. Embedded controls also help reduce the external cabinets that consume valuable floor space. Embedded controls also eliminates bulky robot cabling that can cause a tripping hazard. This can help streamline integration into existing production environments.
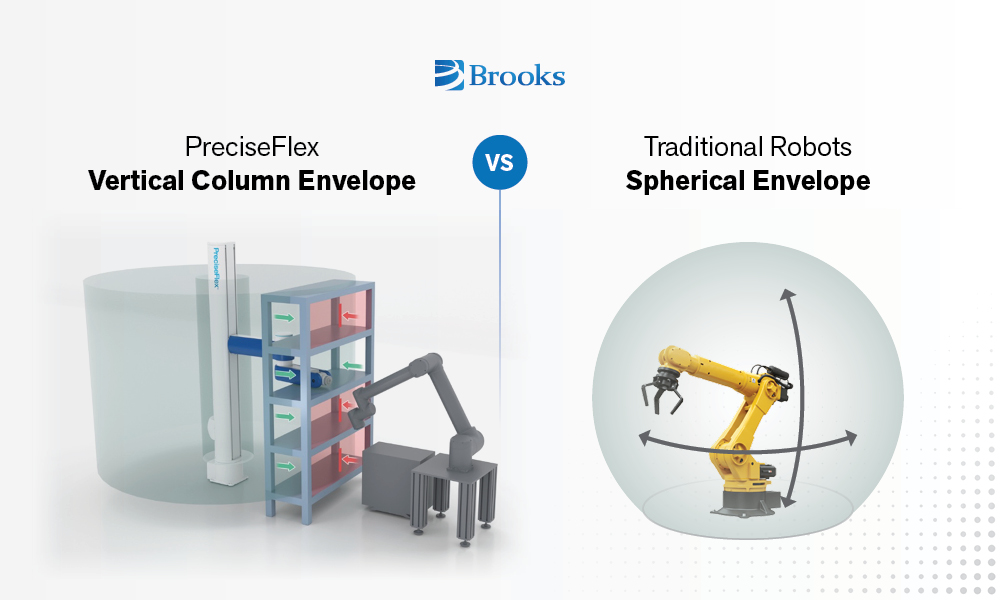
Robotic access efficiency is significantly higher with a vertical column envelope compared to traditional robots with a spherical envelope.
Key advantages include:
- Higher reach-to-footprint ratio
- Better access into racks, shelves, and stacked trays
- Reduced travel distance between process points
- More throughput per square meter
- Less need to expand floor space for automation
Compact robot designs and narrower wrists improve access into confined spaces. Larger robotic systems may struggle to reach these areas efficiently.
Improve Tote And Tray Handling Without Expanding Your Footprint
As production environments become more compact and variable, tote and tray handling has a greater impact on throughput, labor efficiency, and scalability. Systems designed only for basic movement often struggle to maintain consistent flow. This becomes more difficult as layouts evolve and handling demands increase.
High-density robotic systems help operations improve flow without expanding the footprint. Better workspace utilization, higher reliability, and simplified integration make it easier to support high-mix production. They also help reduce operational disruption over time.
Higher workspace utilization supports more efficient layouts. Compact integration helps save valuable floor space. More consistent material flow can also improve scalability over time.

